::產(chǎn)品概述::
Haption Virtuose 6D RV力反饋設(shè)備
Haption Virtuose6D 是一款具有超大工作空間并可在所有6自由度上提供力反饋的觸覺設(shè)備,設(shè)計專用于虛擬現(xiàn)實環(huán)境,特別適合用于對大型虛擬物體進行處理。
Virtuose 6D RV是將高工作效率與高工作量相結(jié)合在一起的產(chǎn)品。6D RV特別適合于縮放與操縱等應(yīng)用,例如模擬、虛擬現(xiàn)實和遠(yuǎn)程應(yīng)用程序,如機器人控制,也稱為遠(yuǎn)程操作等。如今Virtuose 6D RV已經(jīng)被成功地應(yīng)用于機器人醫(yī)療操作以及一些康復(fù)應(yīng)用程序,它的工作空間和高度的透明度對于機器人遙操作解決方案有很大的優(yōu)勢。
?
Virtuose 6D RV具有以下優(yōu)點其中3個按鈕中的2個是可編程的。而手柄是可通過工具更改器更改配置。工具箱是一個可選的小型附件,它允許用戶使用不同的對象來代替標(biāo)準(zhǔn)手柄。例如,用戶可以使用三維打印對象更真實地模擬操作!
?
通過靜態(tài)彈簧補償功能,用戶甚至可以在不影響工作級別或工作區(qū)的情況下將Virtuose 6D RV用于頭部下方,這是按訂單進行配置的選項。
?
Virtuose 6D RV還包括高強度版本,可以使手臂上的力加倍。此版本主要適用于在模擬和遠(yuǎn)程操作中需要大量工作的應(yīng)用程序。
?
6D RV虛擬化與Haption軟件產(chǎn)品組合兼容,使用戶可以直接在CAD軟件中使用Virtuose 6D RV來創(chuàng)建部件仿真和三維開發(fā)平臺,以創(chuàng)建身臨其境的體驗。
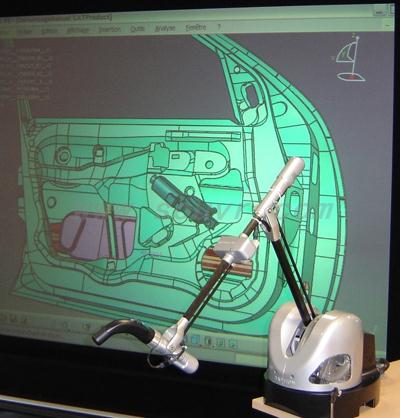
歸功于其大工作空間和高性能,該款設(shè)備與CAD數(shù)字化模型實現(xiàn)了一個成規(guī)模的互動。
主要應(yīng)用領(lǐng)域包括:
? 人體工程學(xué)研究
? 可及性研究
? 裝配仿真
? 項目審查
技術(shù)特點
Virtuose 6D RV是當(dāng)下市場中唯一的一款力反饋系統(tǒng),提供如下特點:
? 所有6自由度上的力反饋( 3個平移和3個旋轉(zhuǎn))
? 操作工作空間對應(yīng)于一個人體手臂的動作
? 構(gòu)成臂的分段長度:450毫米
? 最大力度為35N( 10 N連續(xù)),即提供足夠高度模擬重物操作
? 最大旋轉(zhuǎn)扭矩為3Nm (1 Nm持續(xù)),即提供足夠高度用于大型虛擬對象的兩手處理
? 設(shè)備自身重量的精確靜態(tài)補償
? 模塊化末端效應(yīng)器配備程控開關(guān)
? 夾持工具配備接近傳感器,連接至一項“dead-man”功能:只要用戶未在手中持有夾持工具,或者當(dāng)用戶松開手中的 夾持工具時,電機將關(guān)閉,不會發(fā)生任何主動活動
? 重量減輕,可不使用特定設(shè)備實現(xiàn)運輸
? 主操作系統(tǒng)提供開發(fā)工具包(API)
? 證明與目前市場上的主流應(yīng)用軟件具有兼容性,可使用專用插件:VortexTM、HavokTM、ODE、VirtoolsTM、CatiaTM V5、DelmiaTM V5、ICIDO VDP、SenseGraphics、OpenMask等
? 兼容跟蹤系統(tǒng),如ART、Vicon、Motion Analysis
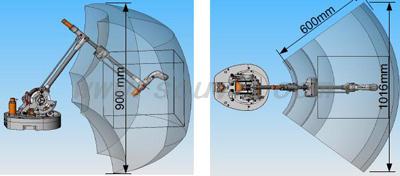
設(shè)備工作區(qū)

Virtuose 6D RV由兩個主要的鉸接段組成,固定在一個旋轉(zhuǎn)底座上。第二段末端與一個鉸接腕相連,可繞三個交叉軸轉(zhuǎn)動。由此,觸覺接口是一個6自由度的移動設(shè)備,在所有方向上提供力反饋。Virtuose 6D RV提供足夠大工作區(qū)包含一個45厘米大小的立方體。位置分辨率為6x10-3 mm。
詳細(xì)規(guī)范
| N°de l’articulation | Débattement en ° | Couple articulaire continu en N.m | Couple articulaire crête en N.m |
| Axe1 | 79 | 5 | 15 |
| Axe2 | 100 | 3.1 | 9.3 |
| Axe3 | 100 | 3.1 | 9.3 |
| Axe4 | 215 | 0.79 | 2.37 |
| Axe5 | 111 | 0.79 | 2.37 |
| Axe6 | 162 | 0.79 | 2.37 |
模塊化
用戶使用位于頂端的夾持器或手柄(稱為“效應(yīng)器”)持有觸覺裝置。末端效應(yīng)器容易拆卸和更換,因而可以頻繁更換工具,以實現(xiàn)定制應(yīng)用并加強沉浸感覺。夾持工具配備有3個按鈕。其中一個按鈕鍵專為補償功能設(shè)計。其他按鈕狀態(tài)可使用VIRTUOSE API訪問。
::產(chǎn)品規(guī)格::
| 規(guī)格 | Haption Virtuose 6D RV力反饋設(shè)備 |
| 平移工作區(qū): | 1330 x 575 x 1020 mm |
| 旋轉(zhuǎn)工作區(qū): | 330° x 120° x 270° |
最大力(平移): | 35 N(高力版本:70 N) |
| 連續(xù)力(平移): | 10 N(高力版本:30 N) |
| 最大扭矩(旋轉(zhuǎn)): | 3.1 N.m(高力版本:5 N.m) |
| 連續(xù)扭矩(旋轉(zhuǎn)): | 1 N.m(高力版本:1.4?N.m) |
| 位置分辨率: | 0.016 mm |
| 旋轉(zhuǎn)分辨率: | 0.003° |
| 設(shè)備重量: | 12 kg |
| 電源: | 100-240 VAC 50/60Hz 單向 |
| 耗電: | 平均耗電:200W 最大耗電:540W |
| 更新速率: | 1000 Hz |
| 最大控制剛度(平移): | 2000 N/m |
| 最大控制剛度(旋轉(zhuǎn)): | 40 N.m/rad |
| 重量平衡: | 靜態(tài)(機械,彈簧) |
| 按鈕數(shù)目: | 3 個(1個離合器,2個特定應(yīng)用) |
| 接口(interface) | 以太網(wǎng) |
| 可替換手柄: | 支持,通過工具更換器 |
::應(yīng)用范圍::
適用于虛擬現(xiàn)實、項目審查、人機工程學(xué)分析、功能測試、裝配/拆卸、工作環(huán)境仿真、操作人員培訓(xùn)、醫(yī)療培訓(xùn)、遠(yuǎn)程外科手術(shù)等諸多領(lǐng)域。
::技術(shù)特征::
? 所有6自由度上的力反饋( 3個平移和3個旋轉(zhuǎn))
? 操作工作空間對應(yīng)于一個人體手臂的動作
? 構(gòu)成臂的分段長度:450毫米
? 最大力度為35N( 10 N連續(xù)),即提供足夠高度模擬重物操作
? 最大旋轉(zhuǎn)扭矩為3Nm (1 Nm持續(xù)),即提供足夠高度用于大型虛擬對象的兩手處理
? 設(shè)備自身重量的精確靜態(tài)補償
? 模塊化末端效應(yīng)器配備程控開關(guān)
? 夾持工具配備接近傳感器,連接至一項“dead-man”功能:只要用戶未在手中持有夾持工具,或者當(dāng)用戶松開手中的 夾持工具時,電機將關(guān)閉,不會發(fā)生任何主動活動
? 重量減輕,可不使用特定設(shè)備實現(xiàn)運輸
? 主操作系統(tǒng)提供開發(fā)工具包(API)
? 證明與目前市場上的主流應(yīng)用軟件具有兼容性,可使用專用插件:VortexTM、HavokTM、ODE、VirtoolsTM、CatiaTM V5、DelmiaTM V5、ICIDO VDP、SenseGraphics、OpenMask等
?兼容跟蹤系統(tǒng),如ART、Vicon、Motion Analysis
::下載資料::
Haption Virtuose 6D RV力反饋設(shè)備中文資料下載
Haption Virtuose 6D RV力反饋設(shè)備英文資料下載


























































備")
備")
備")
備")
備")

